
| Citation: |
Qihang Ai, Mengxi Tan, Max Herbold, Rebecca Russell, Aditya Dubey, Guanghui Ren, Thach G. Nguyen, Dan Yang, Yung-Jr Hung, Arnan Mitchell, "Integrated Photonic Gyroscopes," Electromagnetic Science, in press, doi: 10.23919/emsci.2024.0026, 2022.

|
Integrated photonics gyroscopes(IPGs) have emerged as a promising alternative to other gyroscopes, offering high sensitivity, compactness, and low power consumption, especially being more conducive to integration. In this review, we discuss recent advances in the IPG technology and research, including the different types of IPGs currently being developed, which include waveguide spiral-based, ring laser gyroscope (RLG), and passive ring resonator based IPGs. We highlight efforts to improve the stability, accuracy, and resolution of IPGs, such as using narrow-band laser diodes and using a high-stability, low-noise power supply system. Additionally, we provide an overview of the key performance measures of IPGs, including resolution, drifting, stability, noise cancellation as well as their interrelationships. Finally, we discuss challenges and future directions for the IPG research, including improving long-term stability and addressing sensitivity to shock and vibrations.
A gyroscope is an angular motion detection device [1]. In the inertial navigation system [2]–[5], the gyroscope accurately can measure the angular velocity of the carrier in the inertial reference system, and then further calculates the speed, angle, and position information [6]. Therefore, navigation system with the gyroscope are applied to aircraft, warships, submarines, satellites, space launchers and other fields [7]–[10].
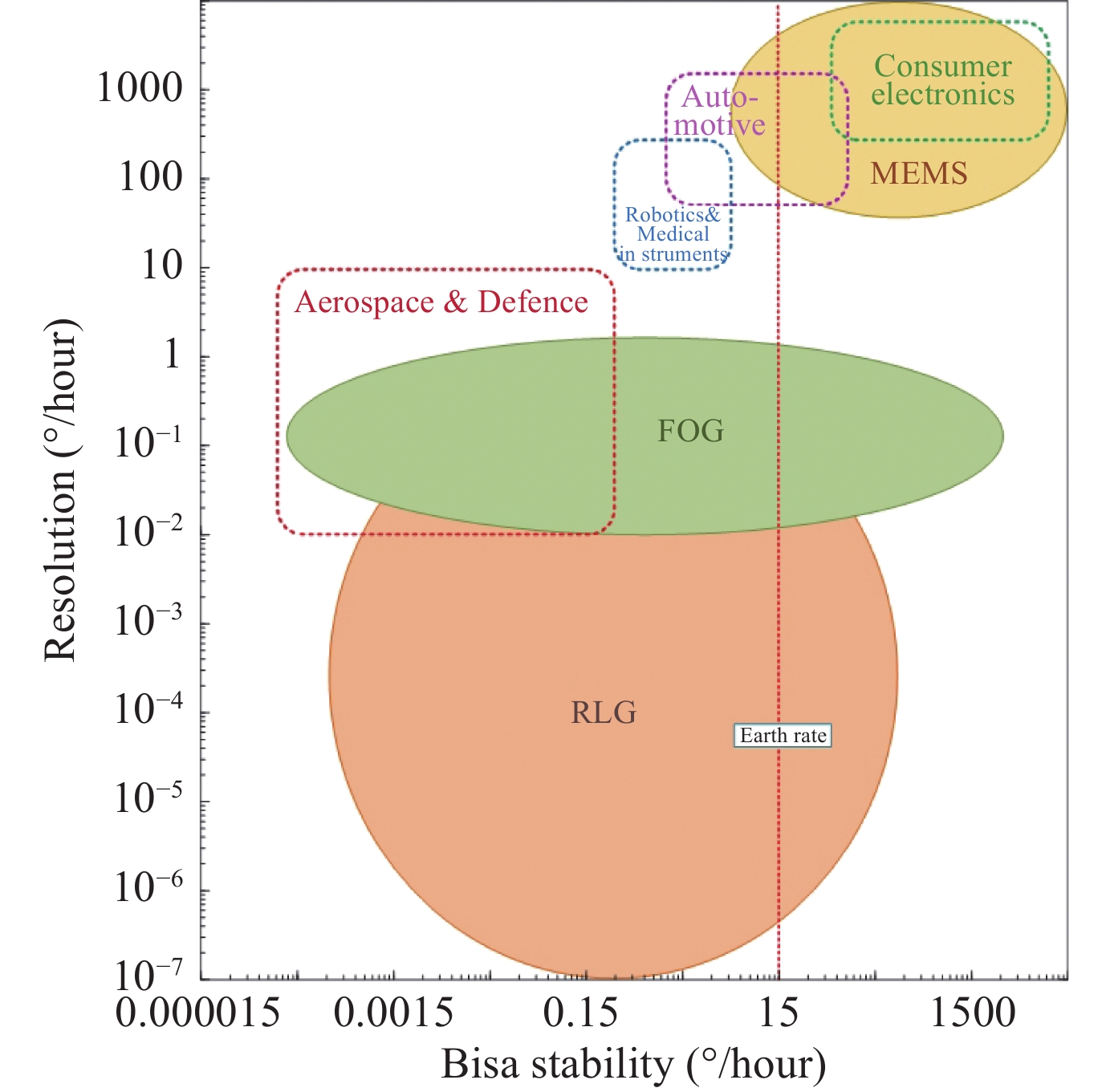
According to different working principles, gyroscopes can be divided into mechanical gyroscopes, microelectronic gyroscopes and optical gyroscopes. The mechanical gyroscope is a mechanical device that measures angular velocity based on mechanical properties [11]. Microelectronic gyroscope is composed of vibrating mechanical parts and it can use Coriolis force to measure angular velocity [12]–[15]. They have met the market request and offered high performance for industrial and other fields. Figure 1 show applications and requirements for different gyroscope technologies. However, they suffer from several drawbacks, including high power consumption, large size, mechanical wear, tear, shock, and vibration. Compared with mechanical and microelectronic gyroscopes, Optical gyroscopes [16]–[18] have the advantages of high accuracy, long service life, no moving parts and good impact resistance [19], [20]. Optical gyroscope is composed of discrete devices and their manufacturing costs and power consumption are high, which doesn't meet the needs of ordinary consumers.
IPGs utilize the interference of light waves in a waveguide to measure angular rotation, which allows for high sensitivity, compactness, and low power consumption. Compared with mechanical gyroscopes and MEMS gyroscopes, IPGs has a longer life, higher accuracy, and more stability. Therefore IPGs have emerged as a promissing alternative to traditional mechanical gyroscopes [21]. The integration of photonic components such as waveguides, modulators, and detectors onto a single chip has enabled the development of small, low-power IPGs with high sensitivity and bandwidth [22]–[24].
With the development of IPGs, some IPGs were proposed based on different material platform such as
In addition to improving the stability, accuracy, and resolution of IPGs, efforts have been made to integrate them with other devices to create compact and low-power navigation systems.
This review aims to provide an overview of recent advances in IPG technology and research. We discuss efforts to improve the stability, accuracy, and resolution of IPGs, such as the use of narrow-band laser diodes. Furthermore, we review the calculation of key performance factors for IPGs and their interrelationships, including resolution, drifting, stability, noise cancellation, and more. We also highlight the challenges that remain to be addressed, such as improving long-term stability and addressing sensitivity to shock and vibration. Finally, we discuss possible future directions for IPG research, such as the use of new materials and geometries, and the integration of IPGs with other emerging technologies.
The gyroscope equation is an equation that describes the behavior of a spinning object in an angular velocity. It can be written as:
| Ω=2πnLλ⋅ΔND | (1) |
where
The equation for the Sagnac-Laue effect can be written as:
| ΔΦ=8πAΩλc+2πn(dλ)sin(θ) | (2) |
Where
The ring laser gyroscope is based on the Sagnac effect. Two laser beams propagate in opposite directions in a closed ring cavity, and when the ring cavity rotates, the resonance frequency of the two laser beams will produce a blue shift and a red shift respectively. The shift results in a frequency difference, which is proportional to the rotation rate
| Δfs=4AλmLΩ | (3) |
where
In the absence of IPGs rotation the ring cavity eigenfrequencies are equal and given by the expression
| fm=mcnL | (4) |
where
| fmccw−fmcw=4AλmLΩ | (5) |
Where A is the area of the ring cavity and
In testing and evaluating integrated photonic gyroscopes (IPGs), certain performance factors are particularly critical. The importance of each factor can vary depending on the specific application and operational environment of the IPG. Here are some of the most important factors:
Resolution: This refers to the smallest angular change that the gyroscope can detect. High resolution is crucial for applications requiring precise angular measurements.
Bias Drift (Zero-rate Bias Stability): Bias drift indicates the change in the gyroscope’s output when it is stationary. It is essential for maintaining accuracy over time, especially in navigation systems where cumulative errors can significantly impact performance.
Angle Random Walk (ARW): ARW is a measure of sensor noise and is important in determining how quickly the error accumulates over time. Lower ARW values are desirable for precision applications.
Scale Factor Stability: This refers to the consistency of the gyroscope’s output relative to the actual rotation rate. Stability in the scale factor ensures that the gyroscope’s sensitivity remains constant over time and under varying conditions.
Bandwidth: The bandwidth of the gyroscope defines the range of frequencies over which the device can accurately measure rotation rates. Higher bandwidth allows for the accurate detection of rapid movements.
Temperature, Shock, and Vibration Sensitivity: Gyroscopes are often used in environments with varying temperatures and mechanical disturbances. Therefore, resistance to temperature fluctuations, shock, and vibrations is crucial for reliable operation.
Noise Cancellation and System Calibration: Effective noise cancellation techniques and accurate system calibration are essential for minimizing errors and improving the overall accuracy of the gyroscope.
Repeatability: This is the ability of the gyroscope to produce consistent readings under the same conditions. High repeatability is critical for applications where the gyroscope is used for precision measurements.
Bias Offset Error: This is the difference between the gyroscope’s output and the true value when the rate of rotation is zero. Minimizing this error is important for accuracy, particularly in inertial navigation systems.
The performance factors of gyroscopes are interdependent and complex. For example, improving temperature stability can enhance bias drift and scale factor stability, while reducing mechanical sensitivity (shock and vibration) improves both bias drift and ARW. Enhancements in noise cancellation techniques directly impact ARW and overall resolution.
The prioritization of these factors depends on the application. In aerospace, bias drift, ARW, and temperature stability are typically prioritized, while consumer electronics focus on size, cost, and power consumption. For navigation systems, long-term stability (bias drift and scale factor stability) and ARW are crucial. ARW measures the random fluctuations when a gyroscope is stationary and is usually expressed in degrees per square root hour
| ARW=√∫f2f1S(f)df | (6) |
where
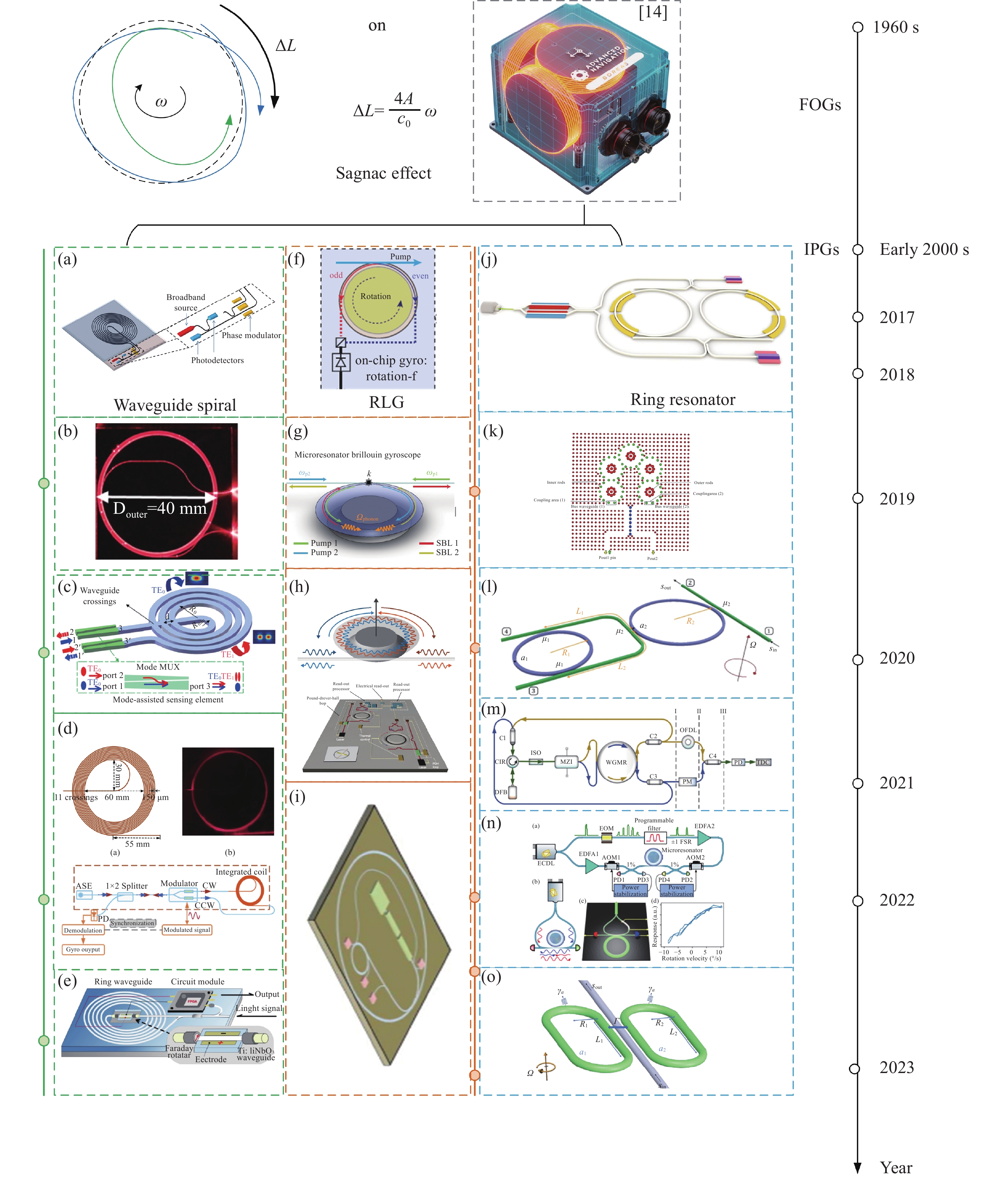
The sensitivity of the IPGs depends on the length of the fiber coil and is a major limitation to its size. The optical waveguide is placed in a Archimedean spiral shape in order to increase sensitivity and reduce the footprint. In addition, by spacing the waveguide crossings a coherence length away, the reflected light only adds in intensity and not phase. Figure 2(a) show that the waveguide spiral IPG was proposed at the hybrid silicon platform and it achieved an angle random walk (ARW) of 8.52°/
Afterwards, a mode-designed on-chip silicon on insulator(SOI) IPG was designed by using two different spatial modes counter propagating in the waveguide sensing coil. The counter-propagating spatial modes induce a fixed phase difference and IPG can achieve detect angular velocity sensitively. In addition, this IPG avoided phase modulator and circulator, thus significantly reduced complexity [46]. SiO2 has been subject to intense research as an optical waveguide and then a interferomeric optical gyro based on an integrated silica waveguide coil was proposed which achieved that the bias drift was 7.32°/h and the ARW was 1.26°/
In a subsequent study, a team theoretically and experimentally proposed and analyzed a new ultra-short coil fiber optic gyroscope structure which fundamentally overcomes the shortcomings of traditional interferometric fiber optical gyroscope that are limited by time and eigenfrequency [48]. This approach lead to a new direction for the research on waveguide spiral IPGs.
The RLG uses the Sagnac effect to measure angular velocity. Its working principle involves emitting laser light into a closed ring cavity, where the light beams propagate in both clockwise and counter-clockwise directions. As the system rotates, the propagation times of the two beams are altered due to the Sagnac effect, resulting in a phase difference. By measuring this phase difference, the angular velocity of the rotation can be calculated. The phase difference is related to the path length of the light beams, the rotational speed, and the wavelength of the laser, making the RLG highly precise and stable. In 2017, Vahala’s team demonstrated a RLG based on a high-Q micro-ring resonator with 18mm which could utilize a single pump to trigger Brillouin lasing in a cascaded fashion to measure the frequency shift caused by Sagnac effect. This IPG could achieve a sensitivity of 15°/h/
Ring resonator IPGs utilize a micro-ring resonator and the Sagnac effect to measure rotation. Light from a laser source is divided by a optical coupler into two waves, whose frequencies are controlled by two phase modulators. As the gyroscope spins, the optical paths traveling in two opposite directions differ, resulting in a resonant frequency difference of counter-propagating light due to the Sagnac effect. By detecting the resonant frequency difference, the rotation and the velocity can be calculated and obtained. Compared with waveguide spiral IPGs and RLG IPGs, IPGs with ring resonator usually have smaller footprint and lower power consumption, and then this type is more conductive to integrate.
In 2018, Parham P.Khial’s team utilized reciprocal sensitivity enhancement to design and implement a ring-resonator-gyroscope. This IPG could reach the bias of 1 r.p.m and an ARW of 650°/
In a subsequent study, researchers proposed the passive phase-sensitive integrated optical gyroscope (IOG) based on photonic crystal ring resonator (PCRR). The IOG was composed of two bus waveguides and five ring resonators. The ring resonators with different radii and refractive indices were used to improve the coupling efficiency. The angular velocity was calculated by calculating the transmission efficiency of the port [54].
A parity-time (PT)-symmetric gyroscope and an anti-parity-time (APT)-symmetric optical gyroscope are both designed based on the concept of parity-time symmetry. The PT-symmetric gyroscope exploits the property that physical systems remain invariant under simultaneous spatial inversion and time reversal, while the APT-symmetric optical gyroscope operates by leveraging the reverse parity-time symmetry within an optical system. The former may find applications in inertial navigation and precision measurement, whereas the latter could potentially be utilized in aerospace technology and precision navigation fields.
In 2019, Martino De Carlo et al. proposed the idea and design of an anti-parity-time (APT)-symmetric optical gyroscope that exhibits resonance splitting independent of device size. In contrast to the previously proposed parity-time (PT)-symmetric gyroscope, the solution demonstrates a true frequency split that can be measured directly at the output power spectrum. In addition, it can be kept at its exceptional point more accurately than the PT-symmetric counterpart [55]. Three years later, this team designed a novel anti-parity-time-symmetric IPG whose structure is resonator-bus-resonator on InP platform for the first time. Compared with other anti-PT symmetric gyroscope, this gyroscope only utilizes one auxiliary waveguide(central bus) to achieve better robustness [58]. There is a key features in ultrahigh-Q micro-ring resonator that they exhibit strong Kerr nonlinearity at low and moderate input power [34], [59], [60]. What’s more, Kerr interaction between counterpropagating light waves in micro-ring resonators can induce spontaneous symmetry breaking [61]–[63]. However, this symmetry breaking can enhances the response of the micro-ring resonator to rotation and result in critical slowing down [64], [65]. Based on this principle, researchers proposed a proof-of principle nonlinear enhanced micro-resonator gyroscope, which operates at the critical point of kerr-induced symmetry breaking between counter-propagating light in a bidirectionally pumped ring resonator, achieving a sensitivity of 2 deg/s [57].
From the data in Table 1, it is clear that there are significant performance differences among the three types of IPGs, specifically between waveguide spiral, ring laser, and passive ring resonator gyroscopes. Waveguide spiral IPGs generally show lower bias stability and much higher ARW compared to ring laser and passive ring resonator IPGs, making them less suitable for applications requiring high precision and long-term stability.
| Methods | Platform | Bandwidth | Bias Drift∘/h | ARW ∘/√h | Resolution | Footprint m2 |
| Waveguide spiral IPG[44] | Si3N4 | 293 nm | 58.7 | 8.52 | 19∘/h/√Hz | 1.257×10−3 |
| Waveguide spiral IPG[45] | Si3N4 | 2.1×10−3 | ||||
| Waveguide spiral IPG[46] | SOI | 10 Hz | 3.85×10−3 | |||
| Waveguide spiral IPG[47] | SiO2 | 300 MHz | 1.26 | 1.21×10−2 | ||
| Waveguide spiral IPG[48] | LiNbO3 | 4×10−4 | ||||
| Ring laser IPG[49] | SiO2 | >1 kHz | 15∘/h/√Hz | Diameter=18 mm | ||
| Ring laser IPG[50] | SiO2 | Diameter=36 mm | ||||
| Ring laser IPG[51] | SiO2 | 3.6 | 0.068 | Diameter=36 mm | ||
| Ring laser IPG[52] | SiO2/Si3N4 | <0.01 | ||||
| Passive ring resonator IPG[53] | Si | several kHz | 650 | 2×10−6 | ||
| Passive ring resonator IPG[54] | Si | 0.35 nm | 2.79×10−10 | |||
| Passive ring resonator IPG[55] | 3.2×10−9 | |||||
| Passive ring resonator IPG[56] | Si | 6×10−4 | ×10−4∘/h | 3.3×10−4 | ||
| Passive ring resonator IPG[57] | SiO2 | 2°/s | Diameter=2.8 mm | |||
| Passive ring resonator IPG[58] | InP | 2×10−6 |
 DownLoad:
CSV
DownLoad:
CSV
For example, the bias stability of waveguide spiral IPGs ranges from
The resolution of the different types of gyroscopes also shows disparities, with passive ring resonator IPGs generally offering better performance, which is critical for high-precision applications. Furthermore, the footprint of waveguide spiral IPGs is larger, which impacts their potential for miniaturization. The smallest footprint of waveguide spiral IPGs is
Given these performance gaps, further discussion is needed on the trade-offs between bias stability, ARW, resolution, and size for different application needs. Waveguide spiral IPGs may be less suitable for high-precision navigation systems where long-term stability is crucial, while passive ring resonators are more ideal for such applications. However, the larger size and higher ARW of waveguide spiral IPGs may be acceptable in less demanding environments or where cost and integration are prioritized.
In recent years, IPGs have found their way into several cutting-edge applications that require high-performance inertial sensing. Aerospace and space exploration are key areas where passive ring resonator and ring laser gyroscopes are being deployed. These gyroscopes offer high bias stability and low ARW, crucial for long-duration missions in satellites, spacecraft, and space telescopes where precise orientation is critical. The European Space Agency (ESA), for instance, has integrated ring laser gyroscopes into spacecraft for precise attitude control.
Additionally, in the rapidly evolving field of autonomous vehicles, including both land-based and aerial drones, high-precision gyroscopes are essential for accurate navigation. Passive ring resonator gyroscopes, with their lower ARW and smaller footprint, are being explored for integration into LiDAR systems for real-time orientation correction and stability enhancement. These gyroscopes are also being employed in robotics to achieve high-precision inertial navigation in environments with minimal GPS access, such as indoor spaces or subterranean exploration.
Emerging technological trends are also advancing gyroscope performance. One such breakthrough is quantum-enhanced gyroscopes [66], which utilize quantum entanglement and squeezed states of light to minimize noise and improve measurement precision. These techniques are still in early development but show promise in exceeding classical gyroscope performance limits, especially in terms of reducing ARW and bias drift. Quantum-enhanced gyroscopes are expected to find applications in military and aerospace sectors, where ultra-precise orientation and stability are paramount.
Moreover, advancements in silicon photonics and photonics-on-chip technologies are paving the way for more compact, low-power, and cost-effective gyroscopes. Researchers are exploring photonic crystal structures and nonlinear optics to reduce optical losses, increase sensitivity, and improve thermal stability. These advances will enable gyroscopes to be integrated into smaller platforms like wearable devices and mobile phones, expanding the range of applications into the consumer electronics space.
Another promising technology is lithium niobate on insulator (LNOI), which offers superior optical confinement and allows for the development of more compact and efficient gyroscope designs. These advancements in materials could significantly reduce the footprint of gyroscopes, making them more feasible for mass deployment in sectors like automotive, medical devices, and precision agriculture.
As integrated photonic gyroscopes continue to evolve, there is a clear trajectory toward improving size, weight, power, and cost (SWaP) factors, which will broaden their applicability in both high-end and consumer markets.
As we look ahead to the future of IPGs, a wave of exciting advancements and possibilities is on the horizon. These developments are poised to be driven by innovative strides in materials science, nanofabrication technologies, and integrated optics. The relentless pursuit of precision and miniaturization in nano-scale fabrication techniques is set to redefine the boundaries of IPGs, making them more compact yet incredibly precise. This evolution will open doors for IPGs to integrate into a diverse array of applications, from consumer electronics to autonomous vehicles, and even space exploration. Advancements in broadband light sources and state-of-the-art waveguide materials are anticipated to significantly elevate IPG performance. Such improvements promise enhanced noise reduction, heightened sensitivity, and bolstered stability against environmental factors, such as temperature shifts and mechanical vibrations. Furthermore, the prospect of integrating IPGs on chips with other photonic components, including lasers, modulators, and detectors, heralds the dawn of sophisticated, multi-functional photonic devices. This integration could revolutionize capabilities in communications, sensing, and imaging. Perhaps one of the most exhilarating frontiers is the convergence of quantum photonic technologies with IPGs.This quantum-enhanced IPG is expected to further improve sensitivity and accuracy. In the realm of autonomous technologies and the Internet of Things (IoT), IPGs are expected to be instrumental in providing precise navigation and orientation information, essential for the seamless operation of autonomous cars, drones, and various IoT devices. Moreover, the miniaturization of IPGs has the potential to make significant inroads in the biomedical field, particularly in applications demanding exact positional information, such as robotic surgery and advanced diagnostics. Space exploration, where parameters such as size, weight, and power consumption are critical, is set to benefit immensely from these advancements in IPGs. More efficient and reliable guidance systems for spacecraft and satellites could be a reality, facilitating deeper exploration into the unknowns of space. The exploration of new materials like 2D materials or photonic crystals, alongside groundbreaking design paradigms such as topological photonics, is paving the way for the next generation of IPGs. These new breeds of IPGs are anticipated to offer unique and enhanced functionalities, setting the stage for a future where the integration of photonic gyroscopes in everyday technology is as common as the silicon chip is today.
In sum, the future of IPGs shines bright, brimming with the potential to revolutionize diverse industries and open new chapters in scientific research. IPGs are also making inroads in several other emerging fields. In the field of wearable technology, IPGs are being explored for applications in motion tracking and health monitoring, owing to their compact size and low power consumption. They are also being tested for deployment in underwater vehicles and submarines, where accurate navigation is crucial in challenging environments with minimal GPS signal availability. In telecommunications, IPGs have the potential to be integrated into fiber optic systems to enhance stability and reduce phase noise in long-distance communication links. These emerging applications underscore the versatility and adaptability of IPGs in addressing diverse technological challenges across various sectors. The convergence of various scientific and technological domains promises not just incremental improvements but transformative changes that could redefine our interaction with technology and the world around us.
Here, we review advances in IPG technology and research in recent years, focusing on different types of IPGs that have been developed, including waveguide spiral-based, RLG, IPGs, and passive ring resonator IPGs, and their advantages and disadvantages. We highlight advances in improving the stability, accuracy, and resolution of IPGs, as well as the integration of IPGs with other devices to create compact, low-power navigation systems. The challenges that remain to be addressed, such as improving the long-term stability of IPGs, and possible future directions for IPG research are also discussed.
This work was supported by the National Natural Science Foundation of China (No.
| [1] |
J. B. Scarborough, The Gyroscope. Interscience Publ., New York, NY, USA, 1958.
|
| [2] |
E. P. Li, H. Z. Ma, M. Ahmed, et al., “An electromagnetic perspective of artificial intelligence neuromorphic chips,” Electromagnetic Science, vol. 1, no. 3, article no. 0030151, 2023. doi: 10.23919/emsci.2023.0015
|
| [3] |
J. C. Zhang, G. B. Wu, M. K. Chen, et al., “Electromagnetic wave tailoring: From one dimension to multiple dimensions,” Electromagnetic Science, vol. 1, no. 3, article no. 0030131, 2023. doi: 10.23919/emsci.2023.0013
|
| [4] |
K. X. Ma, “Regulation and control of electromagnetic field in radio-frequency circuits and systems,” Electromagnetic Science, vol. 1, no. 3, article no. 0030101, 2023. doi: 10.23919/emsci.2022.0010
|
| [5] |
Q. H. Liu, S. W. Wan, and C. H. Zhu, “The spectral integral method (SIM) for the scattering from an arbitrary number of circular pec cylinders,” Electromagnetic Science, vol. 1, no. 4, article no. 0040262, 2023. doi: 10.23919/emsci.2023.0026
|
| [6] |
D. C. Wilkins, “General equation for the precession of a gyroscope,” Annals of Physics, vol. 61, no. 2, pp. 277-293, 1970. doi: 10.1016/0003-4916(70)90285-X
|
| [7] |
V. A. Serrão and M. A. R. Franco, “Single-polarization single-mode hollow core photonic bandgap fiber for gyroscope applications, ” in Proceedings of the 24th International Conference on Optical Fibre Sensors, Curitiba, Brazil, article no. 963470, 2015, doi: 10.1117/12.2195270.
|
| [8] |
C. Acar and A. Shkel, MEMS Vibratory Gyroscopes: Structural Approaches to Improve Robustness. Springer, New York, 2008.
|
| [9] |
L. Van Hao and T. Nesterenko, “Personal navigation system based on MEMS gyroscope, ” in Proceedings of MATEC Web of Conferences, EDP Sciences, article no. 01020, 2017, doi: 10.1051/matecconf/201710201020. (查阅网上资料,未找到本条文献出版地信息,请确认) .
|
| [10] |
B. Chaumet, B. Leverrier, C. Rougeot, et al., “A new silicon tuning fork gyroscope for aerospace applications, ” in Proceedings of Symposium Gyro Technology, Karlsruhe, Germany, article no. 1, 2009.
|
| [11] |
N. Pozzi, M. Bonfanti, and G. Mattiazzo, “Mathematical modeling and scaling of the friction losses of a mechanical gyroscope,” International Journal of Applied Mechanics, vol. 10, no. 3, article no. 1850024, 2018. doi: 10.1142/S1758825118500242
|
| [12] |
R. N. Dean, S. T. Castro, G. T. Flowers, et al., “A characterization of the performance of a mems gyroscope in acoustically harsh environments,” IEEE Transactions on Industrial Electronics, vol. 58, no. 7, pp. 2591-2596, 2011. doi: 10.1109/TIE.2010.2070772
|
| [13] |
P. Greiff, B. Boxenhorn, T. King, et al., “Silicon monolithic micromechanical gyroscope, ” in Proceedings of TRANSDUCERS’91: 1991 International Conference on Solid-State Sensors and Actuators. Digest of Technical Papers, San Francisco, CA, USA, pp. 966-968, 1991, doi: 10.1109/SENSOR.1991.149051.
|
| [14] |
N. Yazdi, F. Ayazi, and K. Najafi, “Micromachined inertial sensors,” Proceedings of the IEEE, vol. 86, no. 8, pp. 1640-1659, 1998. doi: 10.1109/5.704269
|
| [15] |
K. Liu, W. P. Zhang, W. Y. Chen, et al., “The development of micro-gyroscope technology,” Journal of Micromechanics and Microengineering, vol. 19, no. 11, article no. 113001, 2009. doi: 10.1088/0960-1317/19/11/113001
|
| [16] |
S. Ezekiel and H. J. Arditty, “Fiber-optic rotation sensors. Tutorial review, ” in Proceedings of the 1st International Conference MIT on Fiber-Optic Rotation Sensors and Related Technologies, Cambridge, Mass., USA, pp. 2-26, 1981, doi: 10.1007/978-3-540-39490-7_1.
|
| [17] |
W. W. Chow, J. Gea-Banacloche, L. M. Pedrotti, et al., “The ring laser gyro,” Reviews of Modern Physics, vol. 57, no. 1, pp. 61-104, 1985. doi: 10.1103/RevModPhys.57.61
|
| [18] |
W. M. Macek and D. T. M. Davis Jr, “Rotation rate sensing with traveling-wave ring lasers,” Applied Physics Letters, vol. 2, no. 3, pp. 67-68, 1963. doi: 10.1063/1.1753778
|
| [19] |
R. Bergh, H. Lefevre, and H. Shaw, “An overview of fiber-optic gyroscopes,” Journal of Lightwave Technology, vol. 2, no. 2, pp. 91-107, 1984. doi: 10.1109/JLT.1984.1073580
|
| [20] |
S. J. Spammer and P. L. Swart, “Open-loop fiber optic gyroscope with wide dynamic range and source variation insensitivity, ” in Proceedings of Fiber Optic Gyros: 15th Anniversary Conference, Boston, MA, USA, pp. 215-225, 1992, doi: 10.1117/12.135050.
|
| [21] |
A. Lawrence, “The micro-optic gyro, ” in Symposium Gyro Technology 1983, Stuttgart, West Germany, article no. 1, 1983. (查阅网上资料, 未找到本条文献信息, 请确认) .
|
| [22] |
J. Nayak, “Fiber-optic gyroscopes: From design to production [invited],” Applied Optics, vol. 50, no. 25, pp. E152-E161, 2011. doi: 10.1364/AO.50.00E152
|
| [23] |
R. Bergh, H. Lefevre, and H. Shaw, “An overview of fiber-optic gyroscopes, ” Journal of Lightwave Technology, vol. 2, no. 2, pp. 91-107, 1984, doi: 10.1109/JLT.1984.1073580. (查阅网上资料,本条文献与第19条文献重复,请确认).
R. Bergh, H. Lefevre, and H. Shaw, “An overview of fiber-optic gyroscopes, ” Journal of Lightwave Technology, vol. 2, no. 2, pp. 91-107, 1984, doi: 10.1109/JLT.1984.1073580. (查阅网上资料,本条文献与第19条文献重复,请确认).
|
| [24] |
L. Chang, S. T. Liu, and J. E. Bowers, “Integrated optical frequency comb technologies,” Nature Photonics, vol. 16, no. 2, pp. 95-108, 2022. doi: 10.1038/s41566-021-00945-1
|
| [25] |
M. Kondo, Y. Ohta, Y. Tanisawa, et al., “Low-drive-voltage and low-loss polarisation-independent LiNbO3 optical waveguide switches,” Electronics Letters, vol. 23, no. 21, pp. 1167-1169, 1987. doi: 10.1049/el:19870813
|
| [26] |
C. Wang, M. Zhang, X. Chen, et al., “Integrated lithium niobate electro-optic modulators operating at CMOS-compatible voltages,” Nature, vol. 562, no. 7725, pp. 101-104, 2018. doi: 10.1038/s41586-018-0551-y
|
| [27] |
R. Dangel, J. Hofrichter, F. Horst, et al., “Polymer waveguides for electro-optical integration in data centers and high-performance computers,” Optics Express, vol. 23, no. 4, pp. 4736-4750, 2015. doi: 10.1364/OE.23.004736
|
| [28] |
L. Eldada and L. W. Shacklette, “Advances in polymer integrated optics,” IEEE Journal of Selected Topics in Quantum Electronics, vol. 6, no. 1, pp. 54-68, 2000. doi: 10.1109/2944.826873
|
| [29] |
M. Smit, X. Leijtens, 0 H. Ambrosius, et al., “An introduction to InP-based generic integration technology,” Semiconductor Science and Technology, vol. 29, no. 8, article no. 083001, 2014. doi: 10.1088/0268-1242/29/8/083001
|
| [30] |
S. Menezo, A. Talneau, F. Delorme, et al., “10-wavelength 200-GHz channel spacing emitter integrating DBR lasers with a PHASAR on InP for WDM applications,” IEEE Photonics Technology Letters, vol. 11, no. 7, pp. 785-787, 1999. doi: 10.1109/68.769707
|
| [31] |
S. Suzuki, Y. Inoue, and Y. Ohmori, “Polarisation-insensitive arrayed-waveguide grating multiplexer with SiO2-on-SiO2 structure,” Electronics Letters, vol. 30, no. 8, pp. 642-643, 1994. doi: 10.1049/el:19940440
|
| [32] |
C. R. Doerr and K. Okamoto, “Advances in silica planar lightwave circuits,” Journal of lightwave Technology, vol. 24, no. 12, pp. 4763-4789, 2006. doi: 10.1109/JLT.2006.885255
|
| [33] |
D. T. Spencer, J. F. Bauters, M. J. R. Heck, et al., “Integrated waveguide coupled Si3N4 resonators in the ultrahigh-Q regime,” Optica, vol. 1, no. 3, pp. 153-157, 2014. doi: 10.1364/OPTICA.1.000153
|
| [34] |
B. Stern, X. C. Ji, Y. Okawachi, et al., “Battery-operated integrated frequency comb generator,” Nature, vol. 562, no. 7727, pp. 401-405, 2018. doi: 10.1038/s41586-018-0598-9
|
| [35] |
A. A. Savchenkov, A. B. Matsko, D. Strekalov, et al., “Low threshold optical oscillations in a whispering gallery mode CaF2 resonator,” Physical Review Letters, vol. 93, no. 24, article no. 243905, 2004. doi: 10.1103/PhysRevLett.93.243905
|
| [36] |
A. A. Savchenkov, A. B. Matsko, V. S. Ilchenko, et al., “Optical resonators with ten million finesse,” Optics Express, vol. 15, no. 11, pp. 6768-6773, 2007. doi: 10.1364/OE.15.006768
|
| [37] |
R. Soref, “The past, present, and future of silicon photonics,” IEEE Journal of Selected Topics in Quantum Electronics, vol. 12, no. 6, pp. 1678-1687, 2006. doi: 10.1109/JSTQE.2006.883151
|
| [38] |
A. E. J. Lim, J. F. Song, Q. Fang, et al., “Review of silicon photonics foundry efforts,” IEEE Journal of Selected Topics in Quantum Electronics, vol. 20, no. 4, pp. 405-416, 2014. doi: 10.1109/jstqe.2013.2293274
|
| [39] |
F. Dell’Olio, T. Tatoli, C. Ciminelli, et al., “Recent advances in miniaturized optical gyroscopes,” Journal of the European Optical Society-Rapid Publications, vol. 9, article no. 14013, 2014. doi: 10.2971/jeos.2014.14013
|
| [40] |
V. M. N. Passaro, A. Cuccovillo, L. Vaiani, et al., “Gyroscope technology and applications: A review in the industrial perspective,” Sensors, vol. 17, no. 10, article no. 2284, 2017. doi: 10.3390/s17102284
|
| [41] |
W. Z. Korth, A. Heptonstall, E. D. Hall, et al., “Passive, free-space heterodyne laser gyroscope,” Classical and Quantum Gravity, vol. 33, no. 3, article no. 035004, 2016. doi: 10.1088/0264-9381/33/3/035004
|
| [42] |
K. U. Schreiber, J. Kodet, U. Hugentobler, et al., “Variations in the earth’s rotation rate measured with a ring laser interferometer,” Nature Photonics, vol. 17, no. 12, pp. 1054-1058, 2023. doi: 10.1038/s41566-023-01286-x
|
| [43] |
F. Bernauer, J. Wassermann, F. Guattari, et al., “BlueSeis3A: Full characterization of a 3C broadband rotational seismometer,” Seismological Research Letters, vol. 89, no. 2A, pp. 620-629, 2018. doi: 10.1785/0220170143
|
| [44] |
S. Srinivasan, R. Moreira, D. Blumenthal, et al., “Design of integrated hybrid silicon waveguide optical gyroscope,” Optics Express, vol. 22, no. 21, pp. 24988-24993, 2014. doi: 10.1364/OE.22.024988
|
| [45] |
T. Huffman, M. Davenport, M. Belt, et al., “Ultra-low loss large area waveguide coils for integrated optical gyroscopes,” IEEE Photonics Technology Letters, vol. 29, no. 2, pp. 185-188, 2017. doi: 10.1109/LPT.2016.2620433
|
| [46] |
B. B. Wu, Y. Yu, and X. L. Zhang, “Mode-assisted silicon integrated interferometric optical gyroscope,” Scientific Reports, vol. 9, no. 1, article no. 12946, 2019. doi: 10.1038/s41598-019-49380-x
|
| [47] |
D. N. Liu, H. Li, X. Wang, et al., “Interferometric optical gyroscope based on an integrated silica waveguide coil with low loss,” Optics Express, vol. 28, no. 10, pp. 15718-15730, 2020. doi: 10.1364/OE.392510
|
| [48] |
Y. F. Qi, W. B. Feng, F. K. Li, et al., “An ultra-short coil fiber optic gyroscope,” Optics & Laser Technology, vol. 157, article no. 108751, 2023. doi: 10.1016/j.optlastec.2022.108751
|
| [49] |
J. Li, M. G. Suh, and K. Vahala, “Microresonator brillouin gyroscope,” Optica, vol. 4, no. 3, pp. 346-348, 2017. doi: 10.1364/OPTICA.4.000346
|
| [50] |
Y. H. Lai, Y. K. Lu, M. G. Suh, et al., “Observation of the exceptional-point-enhanced sagnac effect,” Nature, vol. 576, no. 7785, pp. 65-69, 2019. doi: 10.1038/s41586-019-1777-z
|
| [51] |
Y. H. Lai, M. G. Suh, Y. K. Lu, et al., “Earth rotation measured by a chip-scale ring laser gyroscope,” Nature Photonics, vol. 14, no. 6, pp. 345-349, 2020. doi: 10.1038/s41566-020-0588-y
|
| [52] |
K. D. Nelson, M. W. Puckett, and J. F. Wu, “A ring-laser gyro based on stimulated brillouin scattering in silicon nitride waveguides, ” in Proceedings of 2020 IEEE Research and Applications of Photonics in Defense Conference (RAPID), Miramar Beach, FL, USA, pp. 1-3, 2020, doi: 10.1109/RAPID49481.2020.9195706.
|
| [53] |
P. P. Khial, A. D. White, and A. Hajimiri, “Nanophotonic optical gyroscope with reciprocal sensitivity enhancement,” Nature Photonics, vol. 12, no. 11, pp. 671-675, 2018. doi: 10.1038/s41566-018-0266-5
|
| [54] |
M. Mohammadi, S. Olyaee, and M. Seifouri, “Passive integrated optical gyroscope based on photonic crystal ring resonator for angular velocity sensing,” Silicon, vol. 11, no. 6, pp. 2531-2538, 2019. doi: 10.1007/s12633-018-0040-9
|
| [55] |
M. De Carlo, F. De Leonardis, L. Lamberti, et al., “High-sensitivity real-splitting anti-PT-symmetric microscale optical gyroscope,” Optics Letters, vol. 44, no. 16, pp. 3956-3959, 2019. doi: 10.1364/OL.44.003956
|
| [56] |
J. T. Geng, L. Yang, S. H. Zhao, et al., “Resonant micro-optical gyro based on self-injection locking,” Optics Express, vol. 28, no. 22, pp. 32907-32915, 2020. doi: 10.1364/OE.405974
|
| [57] |
J. M. Silver, L. Del Bino, M. T. M. Woodley, et al., “Nonlinear enhanced microresonator gyroscope,” Optica, vol. 8, no. 9, pp. 1219-1226, 2021. doi: 10.1364/OPTICA.426018
|
| [58] |
M. De Carlo, F. De Leonardis, L. Lamberti, et al., “Design of a resonator-bus-resonator anti-parity-time-symmetric integrated optical gyroscope,” Optics and Lasers in Engineering, vol. 153, article no. 106983, 2022. doi: 10.1016/J.OPTLASENG.2022.106983
|
| [59] |
P. Del’Haye, A. Schliesser, O. Arcizet, et al., “Optical frequency comb generation from a monolithic microresonator,” Nature, vol. 450, no. 7173, pp. 1214-1217, 2007. doi: 10.1038/nature06401
|
| [60] |
S. Y. Zhang, J. M. Silver, L. Del Bino, et al., “Sub-milliwatt-level microresonator solitons with extended access range using an auxiliary laser,” Optica, vol. 6, no. 2, pp. 206-212, 2019. doi: 10.1364/OPTICA.6.000206
|
| [61] |
L. Del Bino, J. M. Silver, S. L. Stebbings, et al., “Symmetry breaking of counter-propagating light in a nonlinear resonator,” Scientific Reports, vol. 7, no. 1, article no. 43142, 2017. doi: 10.1038/srep43142
|
| [62] |
Q. T. Cao, H. M. Wang, C. H. Dong, et al., “Experimental demonstration of spontaneous chirality in a nonlinear microresonator,” Physical Review Letters, vol. 118, no. 3, article no. 033901, 2017. doi: 10.1103/PhysRevLett.118.033901
|
| [63] |
M. T. M. Woodley, J. M. Silver, L. Hill, et al., “Universal symmetry-breaking dynamics for the Kerr interaction of counterpropagating light in dielectric ring resonators,” Physical Review A, vol. 98, no. 5, article no. 053863, 2018. doi: 10.1103/PhysRevA.98.053863
|
| [64] |
A. F. Kaplan and P. Meystre, “Enhancement of the Sagnac effect due to nonlinearly induced nonreciprocity,” Optics Letters, vol. 6, no. 12, pp. 590-592, 1981. doi: 10.1364/OL.6.000590
|
| [65] |
C. Wang and C. P. Search, “Enhanced rotation sensing by nonlinear interactions in silicon microresonators,” Optics Letters, vol. 39, no. 15, pp. 4376-4379, 2014. doi: 10.1364/OL.39.004376
|
| [66] |
L. Jiao and J. H. An, “Noisy quantum gyroscope,” Photonics Research, vol. 11, no. 2, pp. 150-158, 2023. doi: 10.1364/PRJ.469779
|
| [1] | Yunping Bai, Zhihui Liu, Mengmeng Duan, Jiaxue Feng, Xixi Xiong, Kelei Wei, Kainan Wu, Xiyao Jia, Ruilin Liao, Yuhang Song, Edwin Yue Bun Pun, Sha Zhu, Xingyuan Xu, Ning Hua Zhu, Kun Xu. Microwave Photonic Links and Transversal Microwave Photonic Applications[J]. Electromagnetic Science, 2025, 3(1): 0090541. DOI: 10.23919/emsci.2024.0054 |
| [2] | Xiangzhi Xie, Hanke Feng, Yuansheng Tao, Yiwen Zhang, Yikun Chen, Ke Zhang, Zhaoxi Chen, Cheng Wang. Broadband Millimeter-Wave Frequency Mixer Based on Thin-Film Lithium Niobate Photonics[J]. Electromagnetic Science, 2025, 3(1): 0090462. DOI: 10.23919/emsci.2024.0046 |
| [3] | Yuxuan Xie, Mostafa Khalil, Hao Sun, Jiaren Liu, Zhenguo Lu, Philip J. Poole, John Weber, Guocheng Liu, Mohamed Rahim, Lawrence R. Chen. Applications of Quantum Dash Mode-Locked Laser in Microwave Photonics[J]. Electromagnetic Science, 2025, 3(1): 0090271. DOI: 10.23919/emsci.2024.0027 |
| [4] | Ben You, Ke Wu. Theory of Periodic Sequence: A Highly-Efficient Signal Integrity Modeling for Ultra-Broadband Transmission Lines[J]. Electromagnetic Science, 2025, 6: 1-16. DOI: 10.23919/emsci.2024.0060 |
| [5] | Ze-Yu Luo, Tong Zhang, Yi-Teng Ye, Yun-Fei Wang, Cheng-Cheng Yu, Zhi-Cong Luo, Yi-Jie Zhang, Mo-Chi Xu, Barry C. Sanders, Hui Wang, Chao-Yang Lu, Jian-Wei Pan. On-Demand Photon Storage and Retrieval with a Solid-State Photon Molecule at Room Temperature[J]. Electromagnetic Science, 2024, 2(3): 0070212. DOI: 10.23919/emsci.2024.0021 |
| [6] | Mingzhong Hu, Jingyuan Zheng, Kaiyu Cui, Wei Zhang, Yidong Huang. Photon-Counting Spectrometers Based on Superconducting Nanowire Single-Photon Detectors[J]. Electromagnetic Science, 2024, 2(3): 0070191. DOI: 10.23919/emsci.2024.0019 |
| [7] | Amirhossein Askarian, Pascal Burasa, Ke Wu. Frequency-Diversified Space-Efficient Radiating Surface Using Convolved Electric and Magnetic Currents for Highly Dense Multiband Antenna-Frontend Integration[J]. Electromagnetic Science, 2024, 2(1): 0050212. DOI: 10.23919/emsci.2023.0021 |
| [8] | Qing Huo Liu, Siwei Wan, Chunhui Zhu. The Spectral Integral Method (SIM) for the Scattering from an Arbitrary Number of Circular PEC Cylinders[J]. Electromagnetic Science, 2023, 1(4): 0040262. DOI: 10.23919/emsci.2023.0026 |
| [9] | Lei Zhu, Nengwu Liu. Multimode Resonator Technique in Antennas: A Review[J]. Electromagnetic Science, 2023, 1(1): 0010041. DOI: 10.23919/emsci.2022.0004 |
| Methods | Platform | Bandwidth | Bias Drift∘/h | ARW ∘/√h | Resolution | Footprint m2 |
| Waveguide spiral IPG[44] | Si3N4 | 293 nm | 58.7 | 8.52 | 19∘/h/√Hz | 1.257×10−3 |
| Waveguide spiral IPG[45] | Si3N4 | 2.1×10−3 | ||||
| Waveguide spiral IPG[46] | SOI | 10 Hz | 3.85×10−3 | |||
| Waveguide spiral IPG[47] | SiO2 | 300 MHz | 1.26 | 1.21×10−2 | ||
| Waveguide spiral IPG[48] | LiNbO3 | 4×10−4 | ||||
| Ring laser IPG[49] | SiO2 | >1 kHz | 15∘/h/√Hz | Diameter=18 mm | ||
| Ring laser IPG[50] | SiO2 | Diameter=36 mm | ||||
| Ring laser IPG[51] | SiO2 | 3.6 | 0.068 | Diameter=36 mm | ||
| Ring laser IPG[52] | SiO2/Si3N4 | <0.01 | ||||
| Passive ring resonator IPG[53] | Si | several kHz | 650 | 2×10−6 | ||
| Passive ring resonator IPG[54] | Si | 0.35 nm | 2.79×10−10 | |||
| Passive ring resonator IPG[55] | 3.2×10−9 | |||||
| Passive ring resonator IPG[56] | Si | 6×10−4 | ×10−4∘/h | 3.3×10−4 | ||
| Passive ring resonator IPG[57] | SiO2 | 2°/s | Diameter=2.8 mm | |||
| Passive ring resonator IPG[58] | InP | 2×10−6 |
DownLoad:
CSV

























































 DownLoad:
DownLoad: